
Our Founder
Company founder David Mitchelson can justifiably be regarded as one of the pioneers of automated 3D movement analysis. Previously, in the 1960s, David worked in the space industry in the USA. By the 1970s he had moved back to his native UK, and his interest in movement analysis was borne of a desire to apply space-age technology to benefit societies here on Earth.
He was particularly interested in understanding human motor control systems for clinical applications, as well as artificial limb control system design. But the frame-by-frame cine analysis of that era made this a cumbersome and painstaking task. David felt there had to be a better way.
David began by setting out some basic criteria for a movement analysis system, and it shows his foresight that these features are still widely regarded as the measure of a good system today. These are: high spatial and temporal resolution and accuracy (sub millimetre and >200Hz), automatic identification of markers, real-time output of co-ordinate data with millisecond latency, precalibration, ease-of-use, and portability.

1970s
A number of possible techniques for automated movement analysis were evaluated. These included ultrasound, radar, inertial devices, and video cameras, all of which were rejected as not meeting one or more of the above criteria. So a long odyssey began to find a method that would.
By the mid 1970s, a method was developed using solid-state injection lasers as the markers and a hybrid analogue/digital optical mask as the detection device within the cameras. It was also at this time that the concept of three high-resolution uni-axial cameras mounted on a rigid frame was devised. This enabled the system to be pre-calibrated to allow calculation of the 3-D co-ordinates, without the need for the user to carry out on-site calibration.
The first system was developed as a research instrument within Loughborough University, United Kingdom and achieved resolutions of 1 part in 4000 at a 1KHz sampling rate. It was not a commercial system and it was felt it did not attain high enough spatial resolution.

1980s
The next generation of system was developed within a commercial setting and used passive corner-cube retro-reflecting prisms as markers. This system was termed ‘CODA 3’, which stands for: Cartesian Optical Dynamic Anthropometer (3 dimensional). It wasn’t until much later that this name morphed into ‘Codamotion’.
The prisms were automatically identified by colour using revolving polygonal mirrors as scanning devices. Beams of light were swept across the field of view by the mirrors. When a marker was briefly illuminated by the transiting beam it reflected a pulse of light back via the same mirror. The returning light pulse was detected via a complex set of fibre-optics and photodiode Prism detectors.
Resolutions of better than 1 in 50,000 (approx 0.2mm) at 300Hz sampling rate were achieved with CODA, a small number of which were produced commercially. While its spatio-temporal performance was far better than any other technique available at the time, it suffered from the limitation that only a maximum of 12 prism markers could be uniquely identified by colour.

1990s
The power of embedded microprocessors made possible the next generation of the CODA system.
This became all solid state, using a unique optical correlation technique to achieve resolutions of up to 1 in 100,000 at sampling rates up to 800Hz.
The markers were changed to small infrared LED’s allowing 56 markers to be tracked simultaneously.
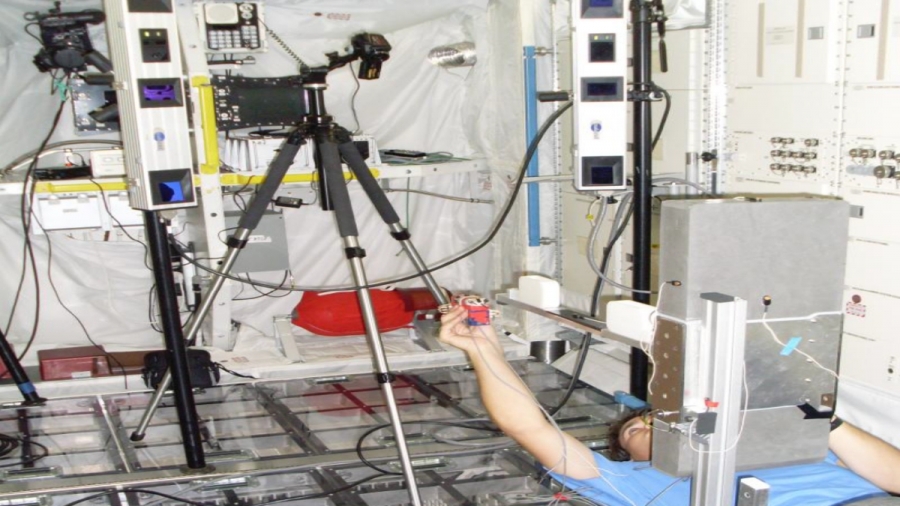
2000s
The desire by researchers to put motion capture experiments into space on the International Space Station led to the development of the sensor units, in a 5kg package that was only 800mm long, yet measured with the accuracy of passive systems that spread cameras widely apart on lab walls.
Light weight, portability and the fact that such systems need no on-site calibration made this technology the choice of leading researchers and clinicians around the world. This reputation for reliability, accuracy and ease of use continues to be at the centre of the world’s best motion capture systems.